無人機具有體積小、重量輕、靈活機動、成本低等特點,可以用于對地偵察拍照,還可以廣泛應用于軍事偵察、地質勘探以及對火災等危險區域的勘察預報等,因而在無人機上構建一個網絡視頻系統就顯得十分重要。本文以基于 PC104的無人機為基礎,構建一個網絡視頻系統,其中,無人機視頻數據的采集、壓縮、解壓縮、傳輸都是無人機網絡視頻系統中的關鍵技術,本文將針對這幾部分的關鍵問題進行研究。
1、系統結構及工作原理
該系統的下位機主要由深圳桑達公司的PC104工控機、羅技快看太空版MP攝像頭(USB接口)、linksysWRT54GC-CN無線路由器及外圍電路組成,采用嵌入式Linux 2.4.26操作系統,主要負責視頻數據的采集,壓縮及將數據發送到上位機。上位機是包含有無線網卡的PC電腦,主要負責視頻數據的接收、解壓和顯示,上下位機通過UDP/IP網絡協議進行數據的傳輸,采用socket網絡編程可以實現網絡的互聯及數據的收發。
PC104工控機采用嵌人式專用CPU PⅢ533~933 MHz,板載DDR內存高達128MB,提供2個RS 232串行接口,2個USB接口,1個并行口,軟盤驅動器接口,IDE硬盤驅動器,10/100 base-TX Ethernet接口,CRT/LCD顯示器接口和固態盤插座,支持DiskonChip 8~288 MB。PC104工控機的操作和使用與PC機相同,安裝系統硬件后,即可開機進行BIOS設置,輸入電壓必須為+5 V,其波動范圍不超過5%。
2、視頻數據采集的軟件實現
Video4Linux(V4L)是嵌入式Linux下視頻設備的內核驅動,他為Linux下的視頻設備提供了一系列的接口函數,在編譯和配置內核階段,必須增加V4L模塊和USB攝像頭驅動模塊的支持。對于USB接口攝像頭,其驅動程序中需要提供基本的I/O操作函數 open,read,write,close的實現,對中斷的處理實現,內存映射功能以及對I/O通道的控制接口函數ioctl的實現等,并把他們定義在 struct file operations中。這樣當應用程序對設備文件進行諸如open等系統調用操作時,Linux內核將通過fileoperations結構訪問驅動程序提供的函數。在系統平臺上對USB攝像頭進行驅動,首先把USB控制器驅動模塊靜態編譯進內核,使平臺中支持USB接口,再在需要使用攝像頭采集時,使用insmode動態加載其驅動模塊,這樣攝像頭就可正常工作了。
在USB攝像頭被驅動后,再利用Video4Linux支持的幾個視頻采集相關的數據結構進行編程,就可以實現視頻數據的采集。圖1是嵌入式Linux下視頻數據采集的流程:
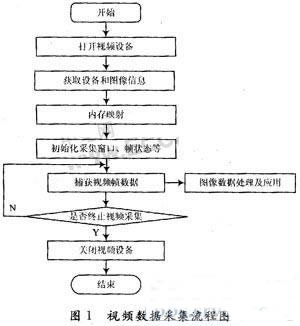
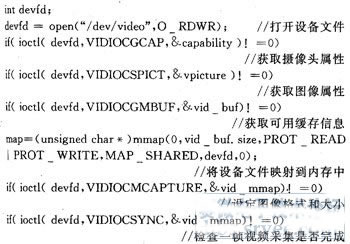
使用ioctl(devfd,VIDIOCSYNC,&vid_mmap)函數判斷一幀圖像是否截取完畢,成功返回表示截取完畢,之后就可把圖像數據保存成文件的形式。為了得到連續幀視頻圖像,可在單幀的基礎上,利用vid_buf.frames值確定采集完攝像頭幀緩沖區幀數據進行循環的次數。在循環語句中,也是使用VIDIOCMCAPTURE ioctl和VIDIOCSYNC ioct1函數完成每幀截取,但要給采集到的每幀圖像賦地址,利用語句buf=map+vid_buf.off-sets[frame],然后保存成文件的形式。
3、視頻數據壓縮原理