




傳感器PCB由互電容傳感器組成,裝在咖啡機的隔板中,而隔板與儲水容器之間存在空隙(參見圖2)。傳感器的發送器和接收器位于其主板上,液體會改變它們之間的互電容。

圖2:液位測量系統正視圖–傳感器與儲水容器的相對位置
傳感器主板主要包含一個發送器TX和 n 個接收器RX陣列(參見圖3)組成。 n 的值取決于容器的高度和期望獲得的分辨率值。接收器RX數量越多,測量分辨率就越高。
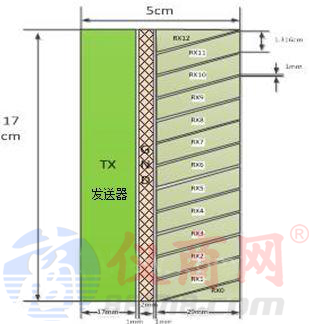
圖3:使用多個接收器進行持續液位監測的互電容傳感器上的發送器和接收器的布局
傳感器主板上的控制器用來測量互電容。通過使用以下方程式將讀數轉換成液位L:

其中:
當前信號 = 所有發送傳感器RX上對應液位的信號數量
空信號 = 所有發送傳感器RX上容器為空時的信號數量
滿信號 = 所有接收傳感器TX上容器為滿時的信號數量
傳感器高度 = 容器高度(所有發送傳感器的高度總和)
可基于上述方程式在固件中進行測量,并通過其他方法滿足系統層面的要求,包括精度、線性、響應時間和功耗等。
確保精度
下面我們來討論一下使用液位傳感技術時需要考慮的重要因素,包括校準、線性度、溫度補償和傳導性干擾。
校準
校準是獲得精確結果所必要條件之一。等式1中的滿信號和空信號數量必需在工廠中確定并儲存在EEPROM中以便用于后續測量。
線性度
非線性也是一個誤差來源。等式1假設發送傳感器TX在從關閉狀態轉換為開啟狀態(即傳感器上沒有液體和有液體兩種狀態)時為線性響應。但實際情況不同于這種理想狀態。實際數據顯示,當液體沒過傳感器時,發送傳感器TX的信號達到最大值的時間會出現明顯的延遲(參見圖4)。這就導致了測量的液位出現非線性響應。

























