相機在垂直方向上能清晰成像的空間距離叫做景深。焦距越短,景深越大;光圈越小,景深越大;鏡頭離物體的距離越遠,景深越大;相機芯片像元越大景深越大。
>>鏡頭的最大兼容芯片尺寸
機器視覺鏡頭的最大兼容芯片尺寸必須大于或等于相機的芯片尺寸,否則會引起嚴重的畸變和相差。
>>機器視覺鏡頭的接口
機器視覺鏡頭接口和相機接口都分為C、CS、F和其他更大尺寸的接口類型。相機和鏡頭是互補的,即C接口的相機只能用C接口的鏡頭,CS接口的相機能用CS接口的鏡頭和加5mm接圈的C接口的鏡頭。
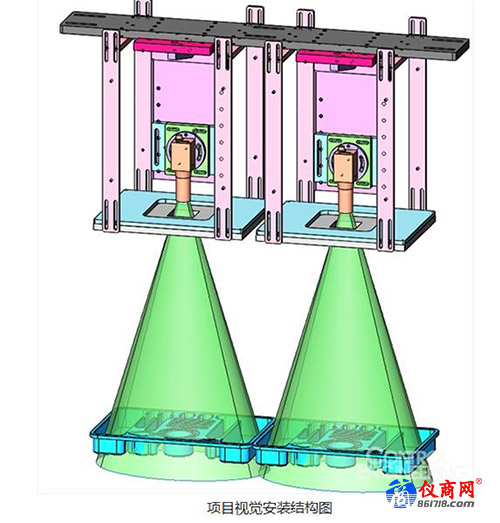
>>機器視覺鏡頭的焦距
鏡頭焦距的選擇根據公式焦距f = 工作距離 × CCD芯片尺寸( H or V) / FOV( H or V)來選擇合適焦距的鏡頭。
本項目根據焦距的計算公式,選用焦距為8mm,接口為C口、最大兼容芯片尺寸為2/3的定焦鏡頭。
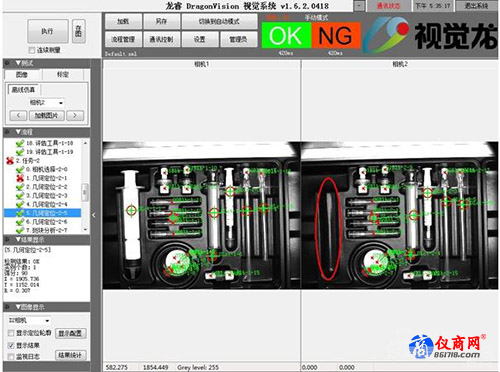
2、軟件解決方案:
軟件采用龍睿標準視覺軟件進行缺陷檢測任務,要求檢測料盒內有沒有醫療器械的缺失和錯位。軟件用到Blob Analyzer工具和Locator定位工具組合的方法來進行缺陷檢測,其中Locator定位工具用來定位檢測適合做模板的器械和限定Blob Analyzer工具的搜索框。Blob Analyzer工具用來檢測較小的器械和一些局部缺失。最后用到評估工具對所用檢測工具進行一次評估判斷OK或NG后把結果發送給PLC進行處理。
A、斑塊分析工具:
>>Blob Analyzer的概念
Blob Analyzer 運用圖像分割算法處理選擇的矩形搜索框內的像素信息,可以根據用戶限定的條件來查找有效的Blob。
>>圖像分割
斑點表示由特定范圍內的灰度值表征的圖像內的特定區域。對于每個新圖像Blob Analyzer會生成一個直方圖,表示矩形搜索框內中的像素值分布,圖像分割算法提供閾值功能,允許Blob Analyzer把圖像的區域分成為兩類:斑點和背景。
>>直方圖
直方圖提供了Blob Analyzer選擇的矩形搜索框中所有像素值的分布,直方圖的像素值范圍為0(黑色)到255(白色)。非常適合Blob檢測的圖像通常呈現雙峰直方圖,即具有兩個尖點
>>閾值
閾值用于將圖像分割成兩種像素,背景像素和斑點像素。根據所選擇的分割模式,可以選擇一個或兩個閾值,此外還有兩種閾值函數,硬閾值和軟閾值。
硬閾值也叫做二進制閾值,因為它將像素分成兩種狀態,背景像素為0,Blob像素為1.結果是二進制圖像。
軟閾值提供了處理邊界斑點區域的像素的靈活性,軟閾值覆蓋一切像素值,一旦處理,閾值范圍內的像素被輸出為加權像素。加權像素用于與以其在閾值范圍內的值相對應的的比例來計算斑點結果。軟閾值內的值的范圍是用戶定義的,并且對應于最大和最小閾值之間的差值。
三、檢測結果相機離線仿真