




直流總線測量最好在存儲電容器輸入端進行,如圖5所示,因為從本質上講,這里的電流是來自交流電源的低頻電容器充電脈沖,是從逆變器吸收的高頻電流脈沖中釋放出來的。
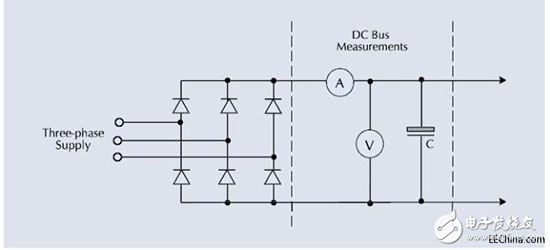
圖5. 設置直流總線測量
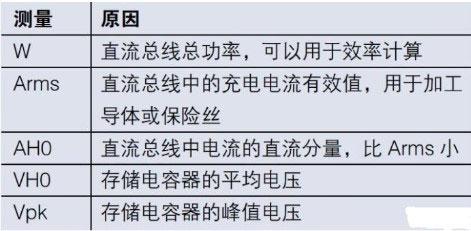
表3. 直流總線關鍵測量參數
如果獨立進行直流總線測量,可以利用分析儀的CH1( 通道1)。不過,直流總線測量往往與驅動器輸入或輸出的三相二線測量一起進行。在這種情況下,應當使用剩余獨立運行通道中某個通道對直流總線進行測量。
例如,將CH1 和CH2 連接,進行輸入或輸出測量。CH3 與直流總線相連,如圖5 所示。使用F[7] 選擇脈寬調制馬達驅動器輸入或輸出模式,并啟動獨立的CH3。
7. 驅動器輸入測量
從本質上講,大多數脈寬調制馬達驅動器輸入電路是三相二極管整流橋,并包含電容濾波器,如圖6 所示。

圖6. 脈寬調制驅動器的輸入整流器和濾波器級
每個輸入相的電流波形由為存儲電容器充電的脈沖組成。圖7 給出某相的電流波形,它包括電源頻率的基波分量以及大量諧波分量。

圖7. 脈寬調制驅動器輸入端電壓和電流波形
如果驅動器的逆變器部分為輸入電路提供一個恒流負載,那么每相的輸入電流將是一個振幅恒定的失真波形,如圖7 和圖8 所示。

圖8. 未經調制的輸入電流波形
遺憾的是,脈寬調制驅動器的逆變器部分可能不向輸入電路提供恒流負載;在這種情況下,從電容器吸收電流的負載電流將受到輸出頻率分量的影響。這意味著,來自交流電源的電流在工頻頻率是復雜的、失真的電流波形,它由驅動器頻率進行調制。圖9 給出其波形。調制可能嚴重影響測量,特別是在低驅動速率,不過,利用擴展的測量區間(為驅動器輸出波形周期整數倍),可以解決這個問題。
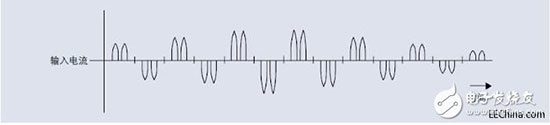
圖9. 在輸出頻率處進行調制的輸入電流波形
PA4000 支持脈寬調制驅動器輸入功率的精密測量,即使馬達處于低頻時。輸入功率測量與交流工頻同步,但通過調節顯示屏更新速率及均值設置,可以擴展測量區間。
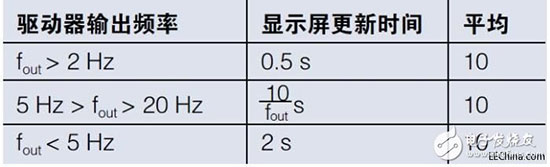
表4. 選擇顯示屏更新時間和均值,把驅動器輸出頻率對驅動器輸入功率測量的影響降到最小
對于超過20 Hz 的輸出頻率,PA4000 的默認設置通常將給出穩定結果。默認設置是:
顯示屏更新速率:0.5 s
平均:10
當輸出頻率在5 Hz ~ 20 Hz 之間時,將均值設置為10,以改進穩定度;對顯示屏更新時間進行設置,使之包括測得的脈寬調制輸出周期(1/f) 的整數倍。根據經驗法則,應提供10 個周期。
例如:
輸出頻率 = 5.5 Hz
顯示屏更新速率 = 10/(5.5 Hz)= 1.8 s
對于低于5 Hz 的輸出頻率,使用最長的顯示屏更新速率(2 s),平均為10。
















