




3、驅動芯片的驅動電路:為了更加方便地來驅動功率開關管,很多公司研制出驅動芯片,驅動芯片可以輸出較大的功率,驅動開關管,而且隨著芯片的小型化發展,現在的驅動芯片體積非常小,有各種封裝形式。利用驅動芯片對功率開關管驅動,這種方法比較簡單,但是控制電路與主電路仍然沒有實現隔離。
控制模塊
主電路的反饋主要有三種控制模式:電壓控制模式,峰值電流控制模式,平均電流控制模式。
1、電壓控制模式:屬于電壓反饋,利用輸出電壓進行校正,是單環反饋模式,輸出電壓采樣與輸入基準電壓比較,得到的輸出信號與一鋸齒波電壓比較,輸出 PWM波信號。電壓控制模式設計以和運用都比較簡單,但是電壓控制模式沒有對輸出電流進行控制,有一定的誤差存在,并且輸出電壓先經過電感以及電容的濾波,使得動態響應比較差。
2、峰值電流控制模式:峰值電流控制模式與電壓控制模式的區別在于,峰值電流控制模式中,把電壓控制模式的那一路鋸齒波形,轉換成了電感的瞬時電流與一個小鋸齒波的疊加。但是電感的瞬時電流并不能表示平均電流的情況。
3、平均電流控制模式:屬于雙環控制方式,電壓環的輸出信號作為基準電流與電感電流的反饋信號比較。設置誤差放大器,可以平均化輸入電流的一些高頻分量,輸出的經過平均化處理的電流,再與芯片產生的鋸齒波進行比較,輸出合適的 PWM 波形。
相比三種控制方式,平均電流的控制方式不限制占空比,對輸出電壓和電感電流均進行反饋,有比較好的控制效果。采用平均電流控制方式進行反饋電路的設計時,把電流環是看作電壓環的一部分。
3、DCDC——“軟開關和硬開關”
DCDC中的硬開關與軟開關有何區別?
硬開關是不管開關管(DS極或CE極)上的電壓或電流,強行turn on或turn off開關管。當開關管上(DS極或CE極)電壓及電流較大時開關管動作,由于開關管狀態間的切換(由開到關,或由關到開)需要一定的時間,這會造成在開關管狀態間切換的某一段時間內電壓和電流會有一個交越區域,這個交越造成的開關管損耗稱為開關管的切換損耗。
軟開關是指通過檢測開關管電流或其他技術,做到當開關管兩端電壓或流過開關管電流為零時才導通或關斷開關管,這樣開關管就不會存在切換損耗。
一般來說軟開關的效率較高(因為沒有切換損);操作頻率較高,PFC或變壓器體積可以減少,所以體積可以做的更小。但成本也相對較高,設計較復雜。
4、DCDC---“EA ”
工程師面對雙向高低壓轉換的測試要求,一般都采用電源負載分開測試的方法。這個方法優點在于成本低和布置簡單,不過犧牲了所占用的測試空間和沒法模擬電池在電流正負極的動態切換特性。
這里就要說到德國EA(ElektroAutomatik)的雙向電源PSB系列——
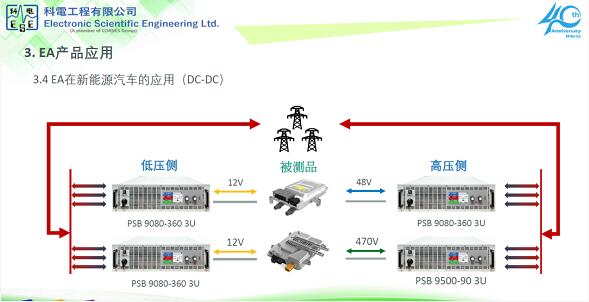
在車載雙向DC-DC測試中,PSB雙向電源提供多款不同電壓電流規格的電源,可覆蓋48V混動系統或高壓純電系統的應用。低壓側的PSB雙向電源可進行低電壓的輸入輸出,連接被測品后,在高壓側的PSB雙向電源可進行高壓的輸入輸出。形成一個電流可雙向流動的測試系統。配合PSB功率大、體積小和作為負載時電能可回饋電網的特性,整個測試搭建兼具節約空間與能源回收的兩項巨大優勢。
PSB雙向電源僅利用4U的體積即可提供30kW的直流電源和電子負載。相比傳統電源+負載動輒將近20U的體積,在系統集成中具有巨大的優勢。僅利用一個機柜即可完成測試臺架的搭建,可有效提高空間利用率。

EA PSB全系列產品內置函數發生器,通過簡單的操作即可實現例如正弦波、方波、梯形波等任意波形的直流輸出。

























