




在汽車行業高速發展的如今,汽車集成了更多的系統單元模塊,隨之而來的數據傳輸壓力成為了不可忽視的一大難題。為解決這一困難,CAN-FD總線應運而生。
本篇文章小編將為大家介紹汽車CAN-FD總線的方方面面,并為您講解RIGOL的數字示波器將如何在CAN-FD總線分析上為您提供強力的支持!
汽車CAN-FD總線
1、CAN-FD總線的前世今生
1986年德國電氣商博世公司開發出面向汽車的CAN(Controller Area Network)通信協議。此后,CAN通過ISO11898及ISO11519進行了標準化。現在,CAN的高性能和可靠性已得到認同并廣泛投入工業生產。
隨著工業的發展,工業總線上的數據量逐日增長,尤其是在CAN總線運用較多的汽車領域,總線通訊的數據量愈發龐大。例如汽車內部出現更多的輔助系統和人機交互系統,使得傳統的CAN總線在傳輸速率和帶寬方面越來越力不從心,CAN總線已逐漸達到負荷極限。根據CAN規范ISO11898-2所定義的標準幀結構,一幀報文最大只能傳輸64位(8個字節)的數據,在最好的情況下總線負載也已達到70%左右。
為了應對現今巨大數據量的挑戰,亟需改進原有的總線來提高總線傳輸速率,CAN-FD(CAN with Flexible Data-Rate)便在這樣的背景下誕生了。
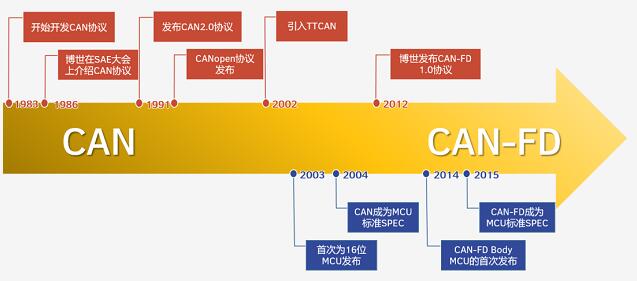
▲CAN總線的發展歷史
2、汽車CAN網絡拓撲圖
下圖舉例了一個汽車CAN網絡拓撲圖。從中可以看到,CAN網絡由CAN節點及不同的CAN總線構成,CAN節點主要由CPU、CAN控制器以及CAN收發器組成,而不同的CAN總線上布置有不同功能的智能電子控制單元(ECU)。
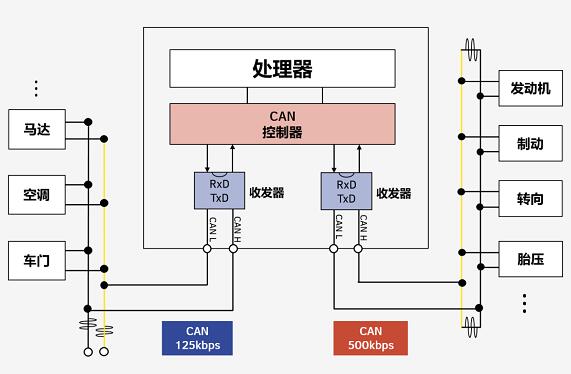
▲CAN網絡的拓撲結構
3、OSI協議棧模型參考
CAN協議涵蓋了ISO規定的OSI基本參照模型中的傳輸層、數據鏈路層及物理層。CAN協議的關于ISO/OSI基本參照模型中的數據鏈路層分為MAC子層和LLC子層,MAC子層是CAN協議的核心部分。
數據鏈路層的功能是將物理層收到的信號組織成有意義的消息,并提供傳送錯誤控制等傳輸控制的流程。具體地說,就是消息的幀化、仲裁、應答、錯誤的檢測或報告。數據鏈路層的功能通常在CAN控制器的硬件中執行,并在物理層定義了信號實際的發送方式、位時序、位的編碼方式及同步的步驟。但信號電平、通信速度、采樣點、驅動器和總線的電氣特性、連接器的形態等均未定義,必須由用戶根據系統需求自行確定。

▲OSI模型對比參考
4、CAN-FD簡介
CAN-FD數據幀幀格式
CAN-FD采用了兩種位速率,從控制場中的BRS位到ACK場之前(含CRC分界符)為可變速率,其余部分為原CAN總線用的速率。CAN-FD數據幀格式如下圖所示:

▲CAN-FD幀格式
IDE(Identifier Extension)標志位擴展位:0表示11位ID,1表示29位ID。
r0,r1(Reserved for future use)保留未來使用:CAN-FD不支持遠程幀。
EDL(Extended Data Length)表示報文格式:0表示CAN-FD報文,1表示CAN報文。
BRS(Bit Rate Switch)速率轉換開關:0表示不轉換速率,1轉換速率。
ESI(Error State Indicator)錯誤狀態指示:0表示錯誤主動狀態,1錯誤被動狀態。
DLC(Data Length Code)數據長度代碼:線性部分為CAN的速率,非線性為CAN-FD可變部分。
CRC場
























