車聯網是什么?
車聯網(V2X,Vehicle-to-Everything)是以車輛為主體,依靠通信網絡互聯實現車間(V2V)、車與人(V2P)、車與網(V2N)、車與基礎設施(V2I)的互聯互通,信息共享,進而達到保障交通安全、提高駕駛體驗、拓展智能服務等目標的智慧交通解決方案。
車聯網中,車輛將與其他車輛以及路邊基礎設施進行通信,共享位置、速度、加速度、甚至防抱死制動系統激活信息。無論是車輛彼此可見還是在一條盲線上,它們都需分享更多的關鍵任務道路和交通狀況信息。
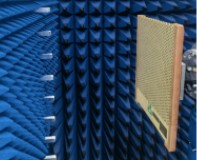
無線信道仿真儀提供了一種在實驗室中模擬車聯網各種通信場景的測試方式。
車聯網需要做哪些測試?
車聯網測試主要包括:
1) 不同車輛運行狀態的衰落信道測試:車輛交匯、跟車、超車、并行和阻塞等場景;
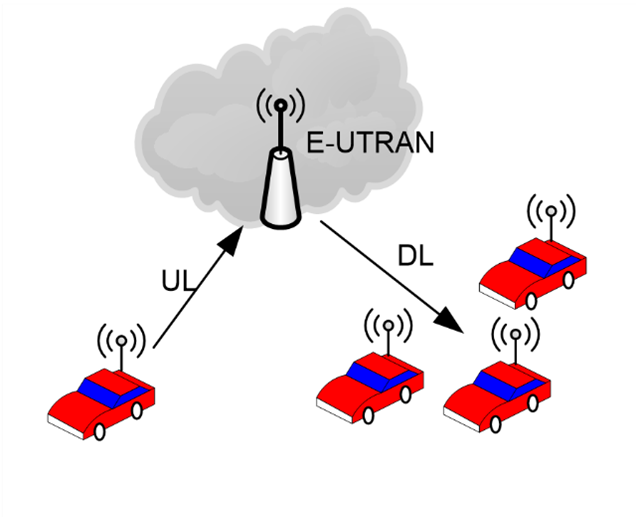
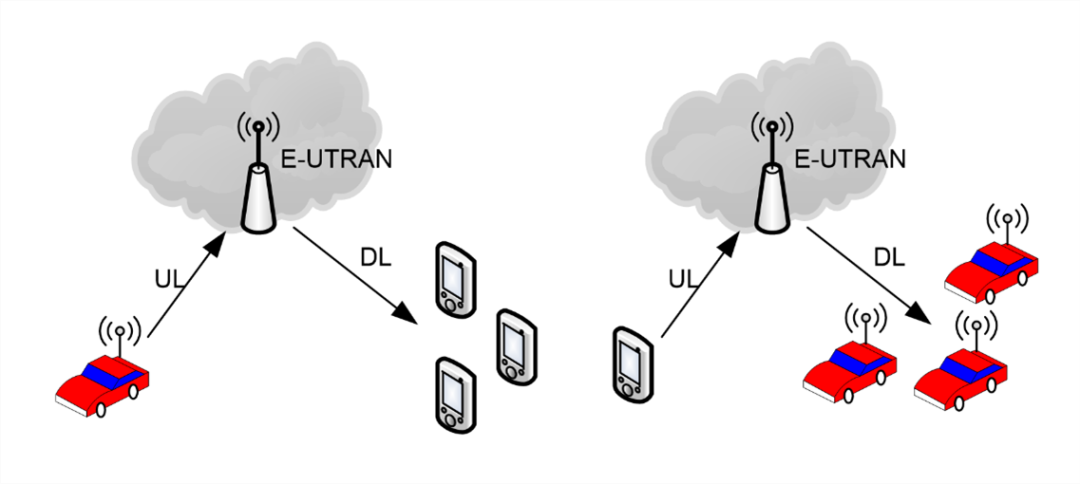
2) 不同通信場景的衰落信道測試:V2V、V2I、V2P、V2N等;
3) 多車輛入網測試;
4) 信噪比測試。
(a) V2V場景
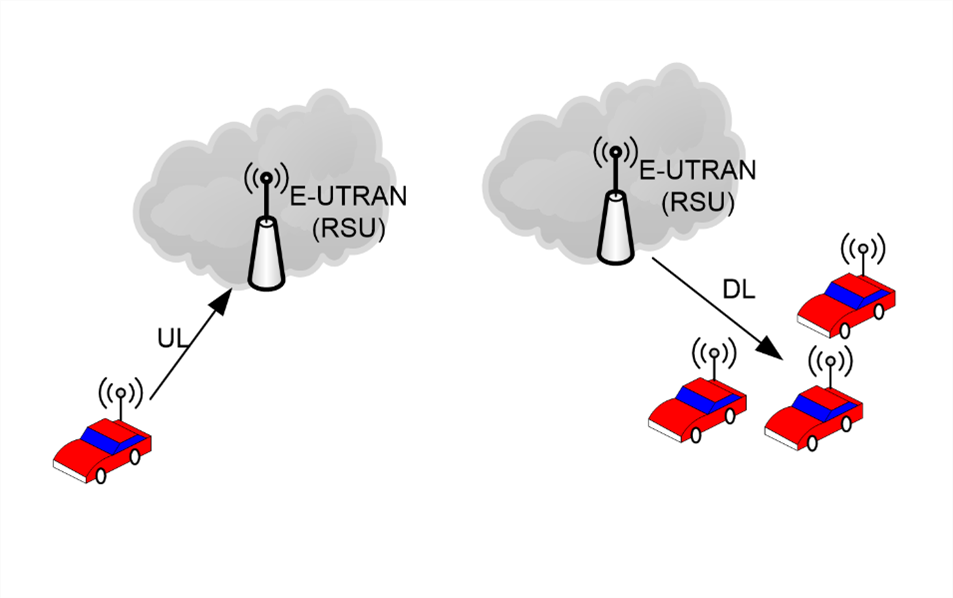
(b) V2I 場景
(c) V2P 場景
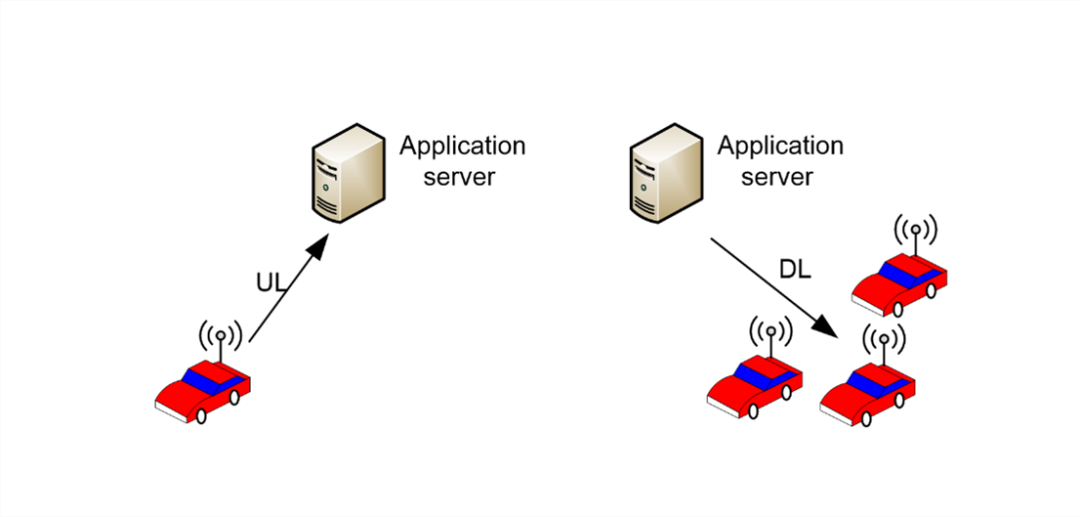
(d) V2N 場景
如何解決車聯網仿真測試問題?
車聯網測試中面臨著多項挑戰,通信單元包含了車輛、基站、終端、路邊單元(RSU)等通信節點,不同的節點擁有不同的天線類型,不同的運動狀態,而且車聯網擁有6GHz和30GHz-63GHz兩個頻段,不同頻段也需要使用不同天線類型。
以上的問題均可以通過KSW-WNS02B型無線信道仿真儀,配置用戶指定的車聯網應用場景和鏈路拓撲,配合KSW-GSCM車聯網信道建模軟件,根據車輛的運行軌跡,生成隨軌跡實時變化的車聯網無線信道沖擊響應。通過離線生成,實時加載仿真的方式,以其強大的擴展能力,靈活定制需求場景,無線信道仿真儀營造了一個理想且完全可復現的車輛運行無線衰落環境。
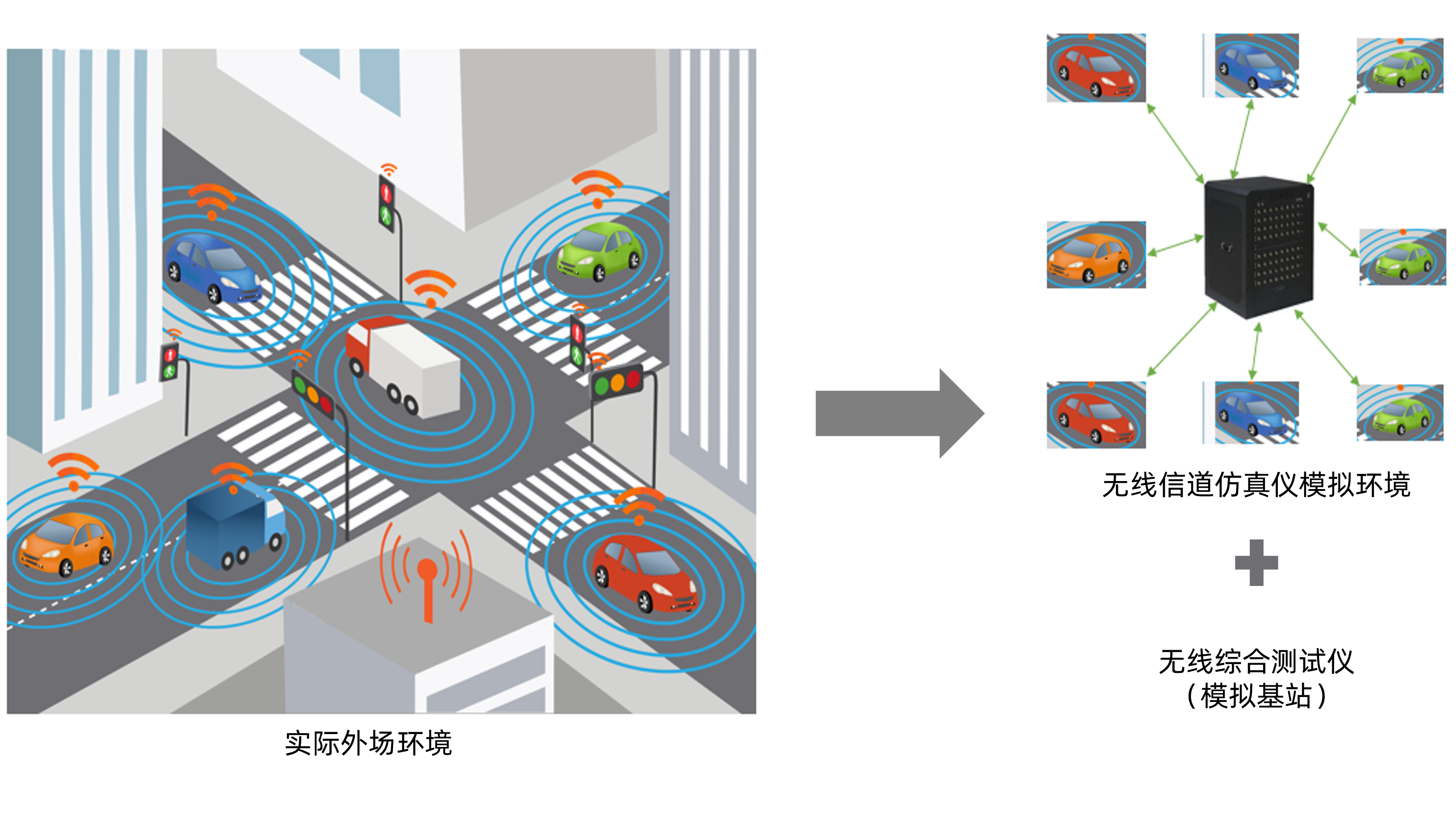
無線信道仿真儀模擬環境圖
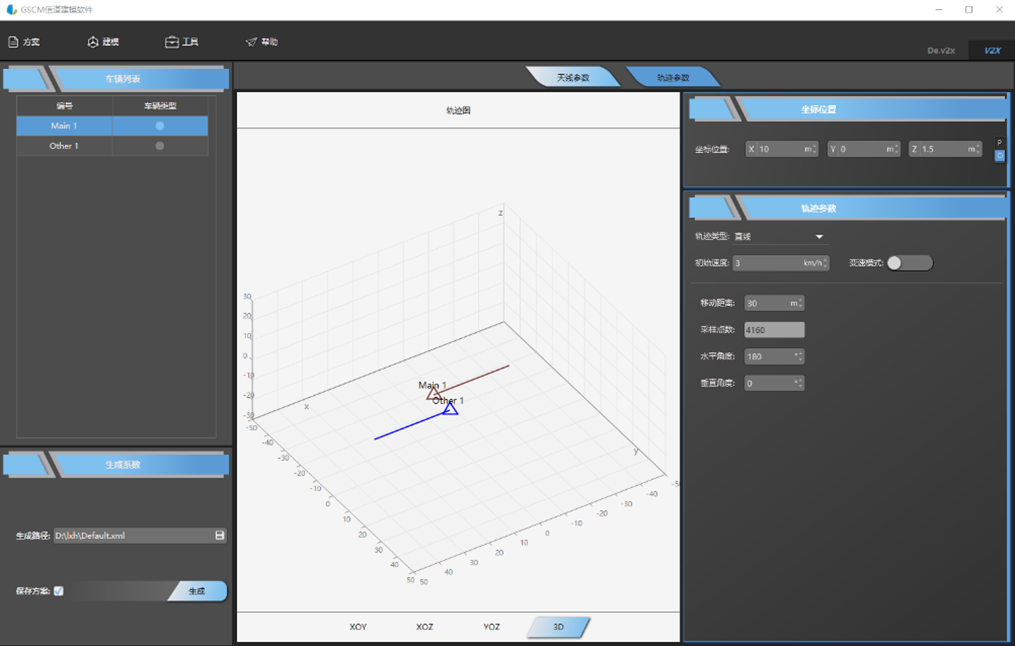
KSW-GSCM車聯網信道建模軟件
車聯網仿真測試同樣需要無線信道仿真儀更強大的數據處理能力,大規模天線陣列的應用,以及逐漸豐富的應用場景,對無線信道仿真儀在數據處理、數據交換、數據存儲和信道建模等方面提出了更高的要求。我們還在幾何信道建模的基礎上開發了基于車聯網的信道仿真系統,可支持3GPP-37885協議中定義的不同頻段、不同天線類型(通信單元)與各種場景的車聯網通信仿真。
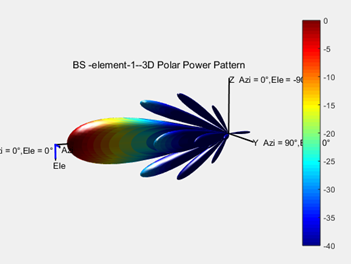
車聯網Macros BS 陣子單元(8*8)方向圖
總結
車聯網是5G重要的下游應用,5G技術大大增強了車與車,車與人,車與道路基礎設施的連接能力,同時也對無線信道仿真儀的硬件指標提出了更高的要求。KSW-WNS02B無線信道仿真儀除了能夠解決車聯網仿真測試的問題,還具有單臺設備最大支持64個射頻雙工通道、最大支持2048條衰落信道、 單通道最大600MHz信號帶寬,聚合帶寬最大2GHz信道、 時延最大3秒、 高達110dB的大尺度衰落范圍等特點。無線信道仿真儀通過解鎖車聯網仿真測試的能力,也助力了車聯網的快速落地。