




(4)仿真與實驗驗證
下面圍繞以上四個方面進行討論。
(1)電機數(shù)學(xué)物理模型分析與建立
隨著電磁材料技術(shù)、計算機輔助設(shè)計技術(shù)、控制技術(shù)、驅(qū)動電路技術(shù)等基礎(chǔ)技術(shù)的發(fā)展,PMSM 特性得以很快的發(fā)展。PMSM 的控制技術(shù)于1971 年得到了突破性的進展。德國西門子公司的Blaschke 等人首先提出了交流電機的矢量控制理論,后來這一理論在PMSM 領(lǐng)域得到了快速的發(fā)展。
PMSM結(jié)構(gòu)模型和等效坐標如圖3和圖4所示。
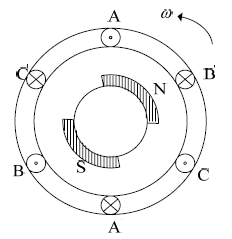
圖3 PMSM 結(jié)構(gòu)模型
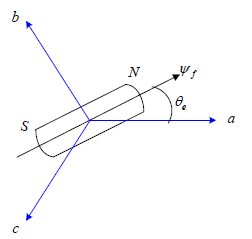
圖4 PMSM 的等效結(jié)構(gòu)坐標圖
電機定子一般由三相繞組和鐵心組成,其中三相繞組往往以星型的方式連接,其物理方程如下:
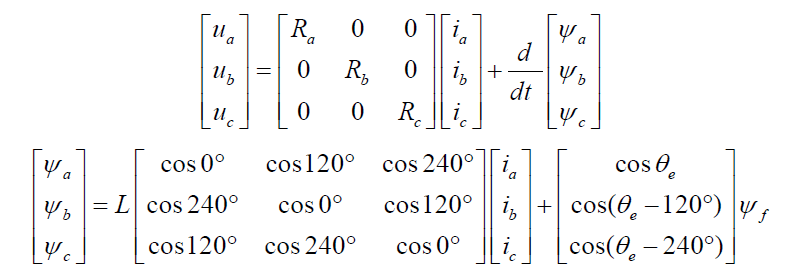
ua、ub 、uc 為三相定子繞組電壓;
Ra 、Rb 、Rc 為三相定子繞組電阻,大小均為R ;
ia 、ib 、ic 為三相定子繞組電流;
ψa ,ψb,ψc 為三相定子繞組的磁鏈;
L 為三相定子繞組的自感,包括漏電感分量和主電感分量;
ψf 為轉(zhuǎn)子永磁磁鏈;
θe 為轉(zhuǎn)子軸線與 A 相繞組軸線夾角的電氣角度。
在永磁同步電機數(shù)學(xué)模型研究中,經(jīng)常用到如圖5-7所示三個坐標系,它們分別是靜止 abc 坐標系、靜止 αβ 坐標系和旋轉(zhuǎn) dq 坐標系。坐標系之間可以進行相互變換,如 abc 坐標系到 αβ 坐標系的坐標系變換稱之為 Clark 變換,αβ 坐標系到 dq 坐標系的變化則是 Park 變換。
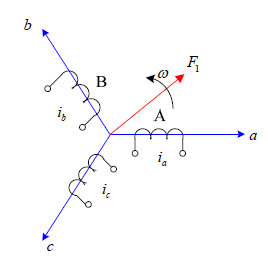
圖5 abc坐標系
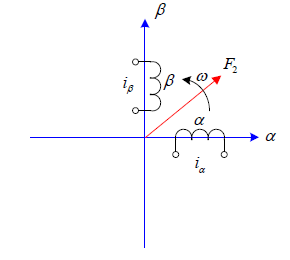
圖6 αβ坐標系

圖7 dq坐標系
在三相交流繞組電路中,假設(shè)繞組A、B、C通以時間上相差120、角速率為 ω 的三相對稱正弦電流,那么三相電流將產(chǎn)生合成的磁動勢 F1,它在空間成正弦分布,與交流電同頻按A? B ?C相序來旋轉(zhuǎn);在兩相繞組 α 和 β 中 ,它們在空間上相差90。當通以時間上相差90、角速率為 ω 的兩相平衡正弦電流時,也能產(chǎn)生空間上為圓形、角速度為 ω 、磁動勢為 F2 的旋轉(zhuǎn)磁場;在旋轉(zhuǎn)坐標系 dq 中,如果在匝數(shù)相等且互相垂直的繞組 d 和繞組 q 中分別通以直流電流。兩相直流電流能夠產(chǎn)生合成的磁動勢 F3 。由于兩個繞組以同步角速度 ω 一起旋轉(zhuǎn),則磁動勢 F3 也會隨之成為旋轉(zhuǎn)磁動勢。經(jīng)過坐標變換之后,即可獲得 dq 旋轉(zhuǎn)坐標系下微分方程如下所示:





















站客服")


