




隨著CAN FD與車載以太網(wǎng)的誕生與應(yīng)用,給新一代智能網(wǎng)聯(lián)車的整車架構(gòu)帶來(lái)顯著的變化,也給整車廠帶來(lái)新的機(jī)會(huì)和挑戰(zhàn)。針對(duì)目前CANFD升級(jí)較復(fù)雜的現(xiàn)狀,ZLG提供了有效解決方案,本文將做簡(jiǎn)單的介紹。
新一代智能網(wǎng)聯(lián)車CANFD的應(yīng)用
傳統(tǒng)的汽車網(wǎng)絡(luò)架構(gòu)主要是由CAN總線組成,車內(nèi)分布式電控單元ECU按照功能劃分為動(dòng)力總成、車身控制、輔助駕駛等總線區(qū)域;車窗、車燈、天窗等則通過(guò)LIN總線接入CAN網(wǎng)絡(luò)。
在新一代智能網(wǎng)聯(lián)車的浪潮下,隨著車載ECU的與日倍增以及處理器運(yùn)算能力和硬件的高速發(fā)展,連接ECU的網(wǎng)絡(luò)需要更大的帶寬,這一需求遠(yuǎn)超CAN等傳統(tǒng)車載網(wǎng)絡(luò)的容量極限。
因此,比較明確的趨勢(shì)是向CAN FD過(guò)渡,CAN FD提供了64字節(jié)的數(shù)據(jù)吞吐量以及最高5Mbps的傳輸速率。由于車載以太網(wǎng)具有高帶寬、低延遲、低成本的特性,在新一代整車架構(gòu)中將替代CAN總線成為優(yōu)選網(wǎng)絡(luò)架構(gòu)。
如圖1所示,以車載以太網(wǎng)作為骨干網(wǎng)絡(luò),將核心域控制器(動(dòng)力總成、車身、娛樂(lè)、ADAS)連接在一起。各個(gè)域控制器在實(shí)現(xiàn)專用的控制功能的同時(shí),還提供強(qiáng)大的網(wǎng)關(guān)功能。從圖1可以發(fā)現(xiàn),在各個(gè)域控制器的下方,各部件之間通訊通過(guò)CANFD來(lái)實(shí)現(xiàn)數(shù)據(jù)共享。
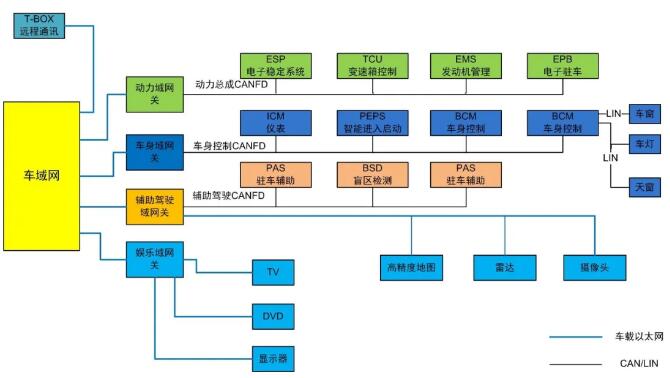
圖1 新一代智能汽車網(wǎng)絡(luò)架構(gòu)
(圖片參考網(wǎng)絡(luò)圖片繪制)
CANFD以及車載以太網(wǎng)的引入,使得新一代智能網(wǎng)聯(lián)汽車整車架構(gòu)上發(fā)生了較為明顯的變動(dòng)。要實(shí)現(xiàn)從傳統(tǒng)汽車到智能網(wǎng)聯(lián)汽車的升級(jí),從整車生產(chǎn)線控制、實(shí)驗(yàn)室、ECU單元的設(shè)計(jì)都將做出很大的改動(dòng),其中涉及的CAN節(jié)點(diǎn)很多且復(fù)雜,如果全部升級(jí)為CANFD節(jié)點(diǎn)來(lái)實(shí)現(xiàn)ECU單元的設(shè)計(jì)、測(cè)試以及生產(chǎn)等,將會(huì)是一個(gè)比較漫長(zhǎng)的過(guò)程。
如何快速實(shí)現(xiàn)設(shè)備CANFD升級(jí)?
隨著新一代智能汽車的發(fā)展,很多車廠都在考慮使用CAN FD來(lái)替代CAN實(shí)現(xiàn)數(shù)據(jù)量傳輸?shù)奶崴佟D壳案鞔筌噺S并未完全實(shí)現(xiàn)車載域控制,在生產(chǎn)線或?qū)嶒?yàn)室存在CAN與CANFD并存的現(xiàn)象,例如,新一代智能汽車ADAS系統(tǒng)中毫米波雷達(dá)等設(shè)備需要采用CANFD提高通訊速率,保證安全駕駛。同時(shí),ADAS也是目前智能汽車中最為重要的一環(huán)。如圖2所示,在現(xiàn)有的整車系統(tǒng)中以CAN網(wǎng)絡(luò)為主,在調(diào)試階段ADAS系統(tǒng)無(wú)法與動(dòng)力控制、車身控制通訊,所以打通CAN與CANFD之間的通訊極為重要。
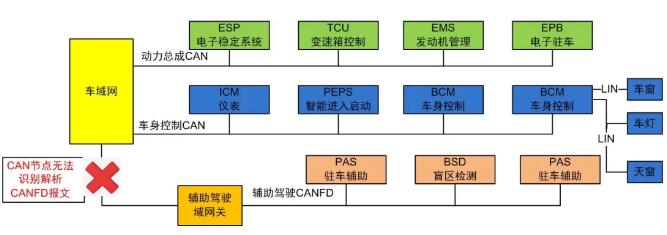
圖2 CANFD通訊現(xiàn)狀
由于CANFD向下兼容CAN,而普通CAN節(jié)點(diǎn)無(wú)法正常解析CANFD報(bào)文。如圖3所示,CAN節(jié)點(diǎn)和CANFD節(jié)點(diǎn)的波特率明顯是不匹配的,CANFD最高5Mbps,進(jìn)而導(dǎo)致通訊故障,就會(huì)一直報(bào)錯(cuò),導(dǎo)致網(wǎng)絡(luò)通訊異常。

圖3 CAN與CANFD波形對(duì)比
那么,如何保證CAN/CANFD節(jié)點(diǎn)正常通訊測(cè)試,快速地升級(jí)到CAN FD呢?
1、網(wǎng)絡(luò)中所有CAN節(jié)點(diǎn)升級(jí)到CANFD
這種方式雖然能夠保證網(wǎng)絡(luò)中既可以存在CAN報(bào)文也可以存在CANFD報(bào)文,但是由于整體網(wǎng)絡(luò)全部更替為CANFD,對(duì)于前期車廠測(cè)試或生產(chǎn)部分單元來(lái)說(shuō),成本較高且使用率低。
2、CAN節(jié)點(diǎn)自動(dòng)忽略CANFD報(bào)文
這種方式是讓網(wǎng)絡(luò)中CAN 2.0節(jié)點(diǎn)不對(duì)CANFD報(bào)文進(jìn)行識(shí)別,能夠保證網(wǎng)絡(luò)中不存在錯(cuò)誤幀,但是CAN節(jié)點(diǎn)與CANFD節(jié)點(diǎn)不能進(jìn)行通訊是存在的弊端,只能作為臨時(shí)方案適用。
3、實(shí)現(xiàn)CAN與CANFD的轉(zhuǎn)化
對(duì)于CAN FD的升級(jí),如果不是全部節(jié)點(diǎn)都進(jìn)行升級(jí),大部分整車廠都會(huì)采用先將動(dòng)力域升級(jí)成CANFD,然后再進(jìn)行各個(gè)功能域的升級(jí),所以,為了避免與CAN總線的沖突,需要首先將CAN網(wǎng)絡(luò)與CANFD節(jié)點(diǎn)的通訊打通,保證在生產(chǎn)線或?qū)嶒?yàn)室能夠進(jìn)行通訊測(cè)試。這種情況,使用CANFD網(wǎng)橋作為轉(zhuǎn)換來(lái)完成是更好的方法。如圖4所示,工程師可以不用在意如何完成CAN與CAN FD報(bào)文之間的轉(zhuǎn)換,只需要進(jìn)行一些參數(shù)的配置選擇,既可以實(shí)現(xiàn)CAN/CANFD的相互轉(zhuǎn)換,也可以將工作重心放到產(chǎn)品功能的實(shí)現(xiàn)上,降低前期測(cè)試的成本,提高使用率。




















合作")
站客服")


