圖2. 組合單軸傳感器輸出。
MEMS IMU頻率響應分析
圍繞新的MEMS IMU開發穩定系統時,在系統設計早期階段了解頻率響應是非常重要的,因為IMU的頻率響應將對控制器設計產生直接影響,可以幫助識別潛在穩定性問題—特別是在考慮到新一代設計的高帶寬解決方案時。這些信息對于預測陀螺儀的振動響應也非常有用。
評估IMU帶寬的一種策略是確定哪些信息在產品文檔中提供,分析此類信息對系統的慣性運動響應的影響,并穩定系統的響應。此類分析以及它涉及的所有校正操作將成為初始測試的基礎。
率響應在IMU和陀螺儀的規格表中表示為"帶寬"。作為一個性能參數,它表示某個頻率,輸出信號幅度在該頻率下降低到傳感器遇到的實際運動幅度的大約70% (–3 dB)。某些情況下,帶寬可也定義為輸出響應落后于實際運動90度時的頻率(對于雙極系統)。這兩個指標可以直接影響控制環路的一個重要穩定準則:單位增益、相位裕量—環路響應的實際相位角度和–180°之間的差值,環路增益為1。了解反饋傳感器的頻率響應,是優化穩定性保證和系統響應之間的平衡的關鍵因素。除了管理穩定性標準之外,頻率響應還會對振動抑制和制定采樣策略產生直接影響,通過這些策略可以測量慣性平臺上的所有關鍵瞬態信息。
要分析系統中的頻率響應,首先要從一個高層次"黑盒子"視圖開始,它描述了系統在整個目標頻率范圍內對輸入的響應。在電子電路中,輸入和輸出是從一般意義上定義的,例如信號電平(伏特),分析通常包括開發傳遞函數,使用s域表示和電路-電平關系,例如基爾霍夫的電壓和電流定律。對于慣性MEMS系統,輸入是IMU遇到的慣性運動,輸出通常以數字碼表示。s域分析技術固然有很大作用,但要為這種類型的系統開發完整的傳遞函數,通常還需要采用其他技術,并且考慮到更多問題。
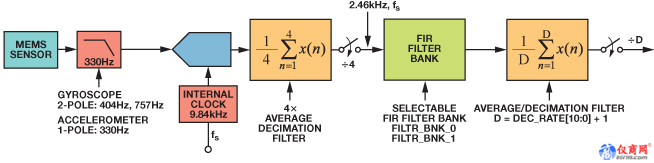
開始分析過程時,首先要了解與傳感器信號鏈相關的所有組件。圖3提供了典型函數的整體示意圖。信號鏈從核心傳感器元件開始,它將慣性運動轉化為代表性的電信號。如果帶寬在傳感器元件中未受限制,則通常受ADC模塊前的信號調理電路中的濾波器限制。信號數字化后,處理器通常應用糾錯(校準)公式和數字濾波。第二級的數字濾波器會減小反饋系統在控制程序中使用的帶寬和采樣速率。所有這些級都可能影響傳感器信號的增益和相位,與頻率相關。圖3提供了一個示例,IMU在混合信號處理系統中具有多個濾波器。該系統可作為一些實用分析技術的示例。