無人飛行器安裝的監控設備、海上微波接收機、車輛安裝的紅外成像系統傳感器以及其他儀器系統都需要具有穩定的平臺,以達到最佳性能,但它們通常在可能遇到振動和其他類型不良運動的應用中使用。振動和正常車輛運動會導致通信中斷、圖像模糊以及其他很多行為,從而降低儀器的性能和執行所需功能的能力。平臺穩定系統采用閉環控制系統,以主動消除此類運動,從而保證達到這些儀器的重要性能目標。圖1是平臺穩定系統的整體框圖,它使用伺服電機來校正角向運動。反饋傳感器為儀器平臺提供動態方位信息。反饋控制器處理這些信息,并將其轉換為伺服電機的校正控制信號。
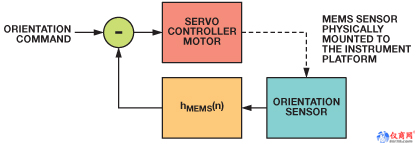
圖1. 基本平臺穩定系統。
由于很多穩定系統需要多個軸向的主動校正,因此慣性測量單元(IMU)通常包括至少三個軸向的陀螺儀(測量角速度)和三個軸向的加速度計(測量加速度和角定向)來提供反饋檢測功能。反饋傳感器的最終目標是提供平臺定向的精確測量,即使當平臺正在運動時也要做到。由于沒有"萬能"傳感器技術能夠在任何條件下提供精確的角度測量,因此平臺穩定系統中的IMU通常在每個軸上使用兩種或三種傳感器類型。
加速度計響應每個軸向上的靜態和動態加速。"靜態加速度"似乎是一個陌生的詞匯,但它涉及重要的傳感器行為:對重力的響應。假定不存在動態加速,并通過校準消除了傳感器誤差,則每個加速度計輸出將代表它的相對于重力的軸定向。為了確定在存在振動和快速加速的情況下穩定系統中通常出現的實際平均定向,通常會將濾波器和融合程序(組合來自多個傳感器類型的讀數,得出最佳估計值)應用于原始測量
另一種類型的傳感器是陀螺儀,它提供角速率測量。陀螺儀測量通過有限周期內的角速率的積分,在角度測量中發揮作用。執行積分時,偏置誤差將導致成比例的角度漂移,隨時間累加。因此,陀螺儀性能通常與設備偏置對不同環境因素的靈敏度相關,這些因素包括溫度變化、電源變化、離軸旋轉和線性加速度(線性g和整流g × g)。校準的高質量陀螺儀,具有對線性加速度的高抑制,使這些設備能夠提供寬帶角信息,作為對加速度計提供的低頻信息的補充。
第三種類型的傳感器是3軸磁力計,它可以測量磁場強度。從三個正交軸的磁場測量實現了相對于地球磁場本地方向的定向角估算。當磁力計接近電機、顯示器和其他動態磁場干擾源時,管理其精度可能非常困難,但在適當情況下,它的角度數據可作為來自加速度計和陀螺儀的數據的補充。雖然很多系統僅使用加速度計和陀螺儀,但磁力計可以改進某些系統的測量精度。
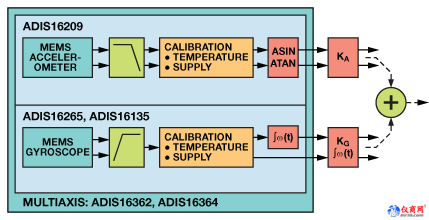
圖2的整體框圖顯示了如何使用陀螺儀和加速度計測量,既利用它們的基本優勢,同時又最大程度減少它們的弱點產生的影響。低通加速度計和高通陀螺儀濾波器的極點位置通常取決于應用,另外精度目標、相位延遲、振動和"正常"運動預測都會對位置決定產生影響。因系統而異的行為也會影響加權因子,而加權因子會對如何組合這兩種測量產生影響。擴展卡爾曼濾波器就是一個組合濾波和加權函數以計算動態角度估計的算法的例子。